Kamera¶
Den här panelen innehåller alla inställningar för den kamera som användes för att filma den film som för närvarande redigeras i Clip editor. Olika fördefinierade inställningar kan användas här och kan väljas från panelhuvudet. Inställningar som distorsionskoefficienter och huvudpunkt ingår dock inte i förinställningarna och måste fyllas i även om kameraförinställningar används.
- Sensorbredd
Är bredden på CCD-sensorn i kameran. Detta värde kan hittas i kamerans specifikationer.
- Video > Bildförhållande per bildpunkt
Är CCD-sensorns pixelaspekt. Det här värdet finns i kamerans specifikationer, men kan också gissas. Du vet t.ex. att filmen ska vara 1920×1080, men själva bilderna är 1280×1080. I det här fallet är pixelaspekten: 1920 / 1280 = 1.5.
Lins¶
- Brännvidd
Är självförklarande; det är den brännvidd som filmen spelades in med. Den kan ställas in i millimeter eller pixlar.
- Optiskt centrum
Är det optiska centrumet i objektivet som används i kameran. I de flesta fall är det detsamma som bildcentrum, men det kan vara annorlunda i vissa specialfall. Kontrollera i sådana fall specifikationerna för kameran/objektivet.
Tips
Optiskt centrum kallas också huvudpunkten inom fotogrammetri.
- Ställ in centrum
- Linsförvrängning
Matematisk funktion för att konvertera förvrängda till oförvrängda koordinater.
- Polynom:
Polynomial radiell distorsion. Använder tre distorsionskoefficienter: K1, K2 och K3.
- Division:
Den definierar höga distorsioner, vilket gör att denna modell passar mycket bättre för kameror med fisheye-objektiv. Använd två distorsionskoefficienter: K1, K2.
- Nuke:
Distorsionsmodell som används av Nuke compositor. Använd två distorsionskoefficienter K1, K2.
- Brun:
Brown-Conrady är en av de mest avancerade matematiska modellerna för linsdistorsion. Används för att modellera både radiell och tangentiell distorsion. Kan använda upp till fyra radiella distorsionskoefficienter: K1 - K4 och upp till två tangentiella distorsionskoefficienter: P1 och P2.
- Koefficienter
Koefficienter används för att kompensera för linsförvrängning när filmen spelades in. För närvarande kan dessa värden endast justeras för hand (det finns ännu inga kalibreringsverktyg) med hjälp av de verktyg som finns i Distortion-läget. För att göra detta justerar du K1 tills lösningen är närmast den kända brännvidden (men ta också hänsyn till rutnät och anteckningar för att förhindra ”omöjlig” distorsion).
- Koefficienter för radiell distorsion (K1 - K4)
Koefficienterna i linsförvrängningsmodellerna fungerar oberoende av varandra. Positiva värden ger en barrel distorsion medan negativa värden ger en pincushion distorsion. Med en blandning av både negativa och positiva koefficienter kan du definiera mer komplicerade mustaschdistorsioner eller andra komplexa distorsioner, som är mindre vanliga men inte sällsynta.
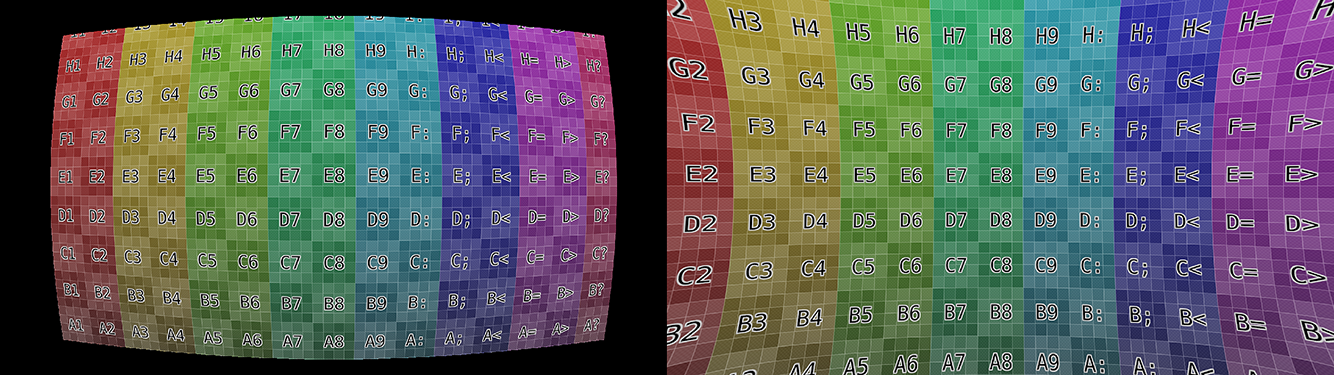
Exempel på radiell distorsion för positiva och negativa K-koefficienter.¶
- Koefficienter för tangentiell distorsion (P1, P2)
Fungerar oberoende och gör det möjligt att kompensera för situationer när sensorn inte är vinkelrät mot en objektivgrupp. Det optiska centrumet (även kallat huvudpunkten) kommer att förskjutas (förvrängas) från sensorns centrum. P1 används för att kompensera för sensorrotation i Z-axeln (vertikalt), medan P2 används för att kompensera för sensorrotation i X-axeln (horisontellt). Sådana förvrängningar kan förekomma i källor från kameror med ett sensorstabiliseringssystem.
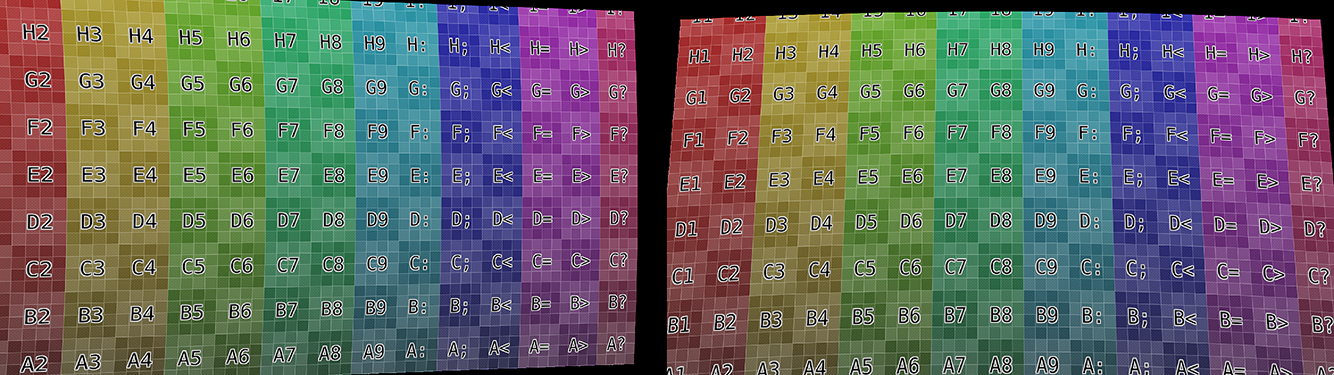
Exempel på tangentiell distorsion för P-koefficienter.¶