Begränsning av omvandling¶
Denna constraint är mer komplex och mångsidig än de andra ”transform”-constraints. Den låter dig ställa in position, rotation eller skala för ett objekt/ben baserat på position, rotation eller skala för ett annat, och blanda och matcha axlar som du vill. Ett exempel kan vara att ställa in en kugghjuls X-rotation baserat på Y-koordinaten för en räls bredvid den.
Begränsningen fungerar med intervall för inmatnings- och utmatningsvärden, ett för varje axel. Först kläms inmatningsvärdet fast i intervallet Map From, sedan förskjuts och skalas det till motsvarande intervall Map To. På så sätt kan du t.ex. mappa en Y-koordinat i intervallet (-3m, 3m) till en X-rotation i intervallet (0, 180°).
Alternativ¶
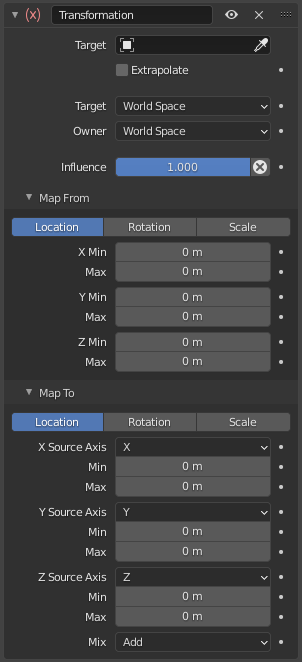
Panel för omvandling.¶
- Mål
Referensobjektet som en transformationsegenskap ska läsas från. Om du inte väljer något blir begränsningens ikon röd och den har ingen effekt.
Se vanliga begränsningsegenskaper för mer information.
- Ben
Om Target är en Armature kan du välja ett ben här för att använda transformationen av det benet istället för armaturobjektet som helhet.
- Extrapolera
Som standard är in- och utgångsvärdena låsta till Min/Max-värdena. När du aktiverar Extrapolate tillåts de att gå utöver dessa gränser. Detta illustreras med graferna nedan, där X-axeln representerar indata (Map From inställd på Min = 1 och Max = 4) och Y-axeln representerar utdata (Map To inställd på Min = 1 och Max = 2).
- Mål/ägare
Standardomvandling mellan mellanslag. Se gemensamma begränsningsegenskaper för mer information.
- Inflytande
Styr den procentuella effekten som begränsningen har på objektet. Se vanliga begränsningsegenskaper för mer information.


Karta från¶
Den transformation som ska läsas av från Target (eller Bone).
- Plats, Rotation, Skala
Den typ av transformation som ska läsas.
- Läge Rotation
Den typ av rotation som ska användas, inklusive olika Euler-ordningar, Quaternion och andra Rotation Channel Modes. Standard är att använda Euler-ordningen för begränsningsägaren.
I läget Quaternion konverteras kanalerna till viktade vinklar på samma sätt som swing-vinklarna i lägena Swing och X/Y/Z Twist.
- X/Y/Z Min, Max
Intervallet för inmatningsvärden för varje axel.
Karta till¶
Den omvandling som ska tillämpas på ägaren.
- Plats, Rotation, Skala
Den typ av omvandling som ska tillämpas.
- Beställning Rotation
Vilken Euler-ordning som ska användas. Standard är den ordning som gäller för begränsningens ägare.
- X/Y/Z Källaxel
För var och en av de tre utgångsaxlarna kan du välja den ingångsaxel som den ska hämta sitt värde från. Du kan välja samma inmatningsaxel flera gånger.
- Min, Max
Utgångsvärdesintervall för varje axel.
- Mix
Anger hur resultatet av begränsningen ska kombineras med den befintliga transformationen. Uppsättningen av tillgängliga val varierar beroende på typen av transformation.
- Ersätt
Resultatet av begränsningen ersätter den befintliga transformationen.
- Multiplicera Scale
De nya värdena multipliceras med de befintliga axelvärdena.
- Lägg till Location Rotation
De nya värdena läggs till de befintliga axelvärdena.
- Före original Rotation
Den nya rotationen läggs till före den befintliga rotationen, som om den tillämpades på en förälder till begränsningens ägare.
- Efter original Rotation
Den nya rotationen läggs till efter den befintliga rotationen, som om den hade tillämpats på ett barn till begränsningens ägare.
Observera
Av historiska skäl är Mix-läget förinställt på Add för placering och rotation och Replace för skala.
När målets rotation används som indata kommer begränsningen alltid att ”ta tillbaka” dem till intervallet (-180 till 180), oavsett vilka de verkliga värdena är. Om målet t.ex. har en rotation på 420 grader runt sin X-axel, kommer de värden som används som X indata av begränsningen att vara:
\(((420 + 180) modulo 360) - 180 = 60 - 180 = -120\)
Därför lämpar sig denna begränsning inte riktigt för att transformera ett objekt baserat på en kugghjuls rotation. Att rotera ett kugghjul baserat på ett objekts transformation fungerar dock bra.
På samma sätt kommer begränsningen alltid att ta deras absoluta värden (dvs. invertera negativa värden) när man använder målets skaltransformationsegenskaper som indata, oavsett vilka de verkliga värdena är.
När ett Min-värde är högre än motsvarande Max-värde anses båda vara lika med Max-värdet. Detta innebär att du inte kan skapa ”omvända” mappningar.
Exempel¶
I följande exempel lägger vi till en begränsning för en växel som ställer in dess X-rotation baserat på en skenas Y-position:
Mål: Järnvägsobjekt
Karta från: Plats
Y Min: -3m
Y Max: 3m
Karta till: Rotation
X Källaxel: Y
X Min: 0°
X Max: 180°

Innan du flyttar skenan.¶

Efter att ha flyttat skenan.¶
Som standard kommer växeln att sluta rotera om skenan går utanför intervallet (-3m, 3m). Du kan aktivera Extrapolate för att ändra detta.